|
Case Report
Robot-assisted laparoscopic enucleation of prostate with early catheter removal: A case report
1 MD, Urology resident, Division of Urology, Department of Surgery, Ramathibodi Hospital, Faculty of Medicine, Mahidol University, Bangkok, Thailand
2 Urology staff, Division of Urology, Department of Surgery, Ramathibodi Hospital, Faculty of Medicine, Mahidol University, Bangkok, Thailand
3 Research assistant, Division of Urology, Department of Surgery, Ramathibodi Hospital, Faculty of Medicine, Mahidol University, Bangkok, Thailand
4 MD, Associate Professor, Division of Urology, Department of Surgery, Ramathibodi Hospital, Faculty of Medicine, Mahidol University, Bangkok, Thailand
Address correspondence to:
Wisoot Kongcharoensombat
Associate Professor, Division of Urology, Department of Surgery, Ramathibodi Hospital, Faculty of Medicine, Mahidol University, Bangkok,
Thailand
Message to Corresponding Author
Article ID: 100066Z15SS2026
Access full text article on other devices

Access PDF of article on other devices

How to cite this article
Supabphol S, Sirisopana K, Phengsalae Y, Ketsuwan C, Sangkum P, Kongcharoensombat W. Robot-assisted laparoscopic enucleation of prostate with early catheter removal: A case report. J Case Rep Images Urol 2026;11(1):33–39.ABSTRACT
Introduction: Current American Urological Association guidelines on surgical management of benign prostatic hyperplasia (BPH) recommend either laser enucleation techniques or minimally invasive simple prostatectomy for prostates exceeding 150 g. Robot-assisted simple prostatectomy (RASP) has emerged as a safe and effective option to address the anatomical challenges, particularly in centers with established robotic expertise.
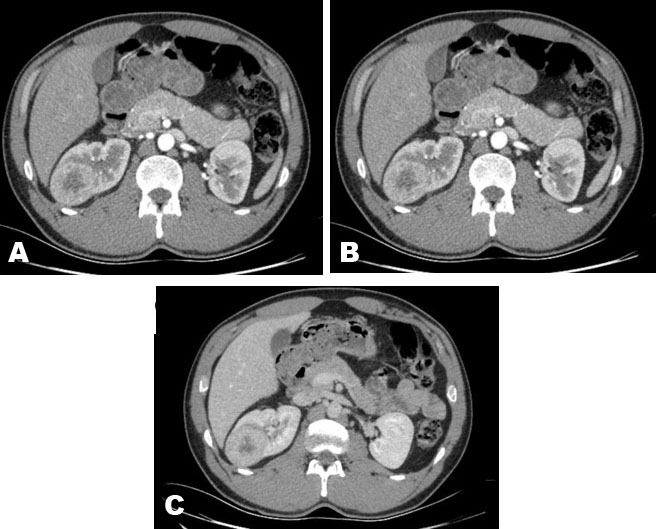
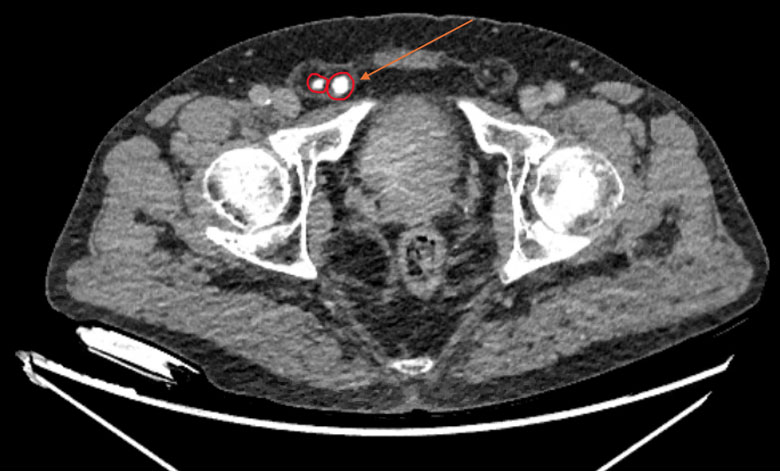
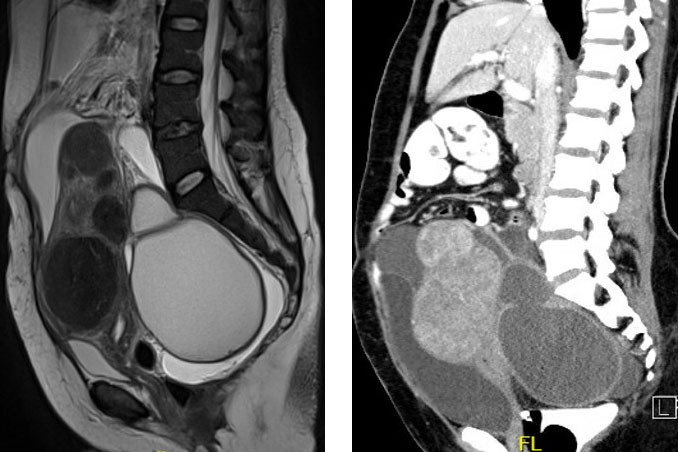
Case Report: A 63-year-old Thai male with essential hypertension and chronic kidney disease presented with progressive lower urinary tract symptoms and a rising serum creatinine level. Imaging revealed a markedly enlarged prostate (213 g) with intravesical protrusion and severe bilateral hydronephrosis. Magnetic resonance imaging was further requested to exclude malignancy, as his initial prostate-specific antigen (PSA) level was 13.13 ng/mL. After confirmation of a PI-RADS 2 lesion and discussion of surgical options, patient accepted to undergo RASP. Due to unexpected intraoperative findings of trilobar prostatic enlargement obscuring both ureteric orifices and distorting normal anatomy, our team was forced to switch from conventional simple prostatectomy to enucleation. Each lobe was removed separately as en bloc dissection was impossible. Total operative time was approximately 3 hours with an estimated blood loss of 400 mL. The urethral catheter was retained for four days and removed before discharge. The pathological report confirmed benign prostatic hyperplasia with 168 g of prostatic tissue removed. At one month, the patient was satisfied with lower urinary tract symptom improvement. Uroflowmetry verified a maximal urinary flow rate of 28 mL/s with a post-void residual urine of 10 mL.
Conclusion: Our case confirmed the safety and practicality of robot-assisted laparoscopic enucleation in extremely large prostates with abnormal configuration. This operation serves as another surgical option for patients who desire excellent functional outcomes with minimal urethral stricture and incontinence rates. However, surgeon experience and the learning curve should also be considered as they directly affect postoperative outcomes.
Keywords: Benign prostatic hyperplasia, Prostatic enucleation, Robot-assisted simple prostatectomy, Very large prostate
SUPPORTING INFORMATION
Acknowledgments
We would like to thank the research assistance unit of the Department of Surgery, Ramathibodi Hospital, Faculty of Medicine, Mahidol University, Bangkok, Thailand for their valuable support and guidance throughout the ethical approval process.
Author ContributionsSuangson Supabphol - Conception of the work, Design of the work, Drafting the work, Final approval of the version to be published, Agree to be accountable for all aspects of the work in ensuring that questions related to the accuracy or integrity of any part of the work are appropriately investigated and resolved.
Kun Sirisopana - Conception of the work, Design of the work, Revising the work critically for important intellectual content, Final approval of the version to be published, Agree to be accountable for all aspects of the work in ensuring that questions related to the accuracy or integrity of any part of the work are appropriately investigated and resolved.
Yada Phengsalae - Acquisition of data, Revising the work critically for important intellectual content, Final approval of the version to be published, Agree to be accountable for all aspects of the work in ensuring that questions related to the accuracy or integrity of any part of the work are appropriately investigated and resolved.
Chinnakhet Ketsuwan - Conception of the work, Design of the work, Revising the work critically for important intellectual content, Final approval of the version to be published, Agree to be accountable for all aspects of the work in ensuring that questions related to the accuracy or integrity of any part of the work are appropriately investigated and resolved.
Premsant Sangkum - Conception of the work, Design of the work, Revising the work critically for important intellectual content, Final approval of the version to be published, Agree to be accountable for all aspects of the work in ensuring that questions related to the accuracy or integrity of any part of the work are appropriately investigated and resolved.
Wisoot Kongcharoensombat - Conception of the work, Design of the work, Revising the work critically for important intellectual content, Final approval of the version to be published, Agree to be accountable for all aspects of the work in ensuring that questions related to the accuracy or integrity of any part of the work are appropriately investigated and resolved.
Guaranter of SubmissionThe corresponding author is the guarantor of submission.
Source of SupportNone
Consent StatementWritten informed consent was obtained from the patient for publication of this article.
Data AvailabilityAll relevant data are within the paper and its Supporting Information files.
Conflict of InterestAuthors declare no conflict of interest.
Copyright© 2026 Suangson Supabphol et al. This article is distributed under the terms of Creative Commons Attribution License which permits unrestricted use, distribution and reproduction in any medium provided the original author(s) and original publisher are properly credited. Please see the copyright policy on the journal website for more information.